
A cirurgia robótica tem se destacado como uma grande inovação na medicina, especialmente nas áreas de urologia, devido à precisão e aos benefícios que oferece aos pacientes.;
Câncer de Próstata:
– Recuperação: Pacientes submetidos à cirurgia robótica tendem a apresentar uma recuperação mais rápida em comparação aos métodos tradicionais.
– Complicações: Menor taxa de complicações pós-operatórias, o que significa menos dor, menos infecções e uma recuperação global mais tranquila.
– Potência e Continência Urinária: Maior eficácia na preservação da função erétil e da continência urinária, devido à maior precisão na preservação dos nervos e tecidos ao redor da próstata.
Câncer de Rim:
– Ressecção de Tumores Complexos: A tecnologia robótica permite a realização de cirurgias minimamente invasivas, facilitando a remoção de tumores complexos com maior precisão.
– Preservação do Rim: Melhores taxas de preservação da função renal, já que a cirurgia robótica permite a remoção apenas do tumor, preservando o máximo possível do tecido renal saudável. Assim, a cirurgia robótica se destaca como uma ferramenta poderosa para melhorar os resultados clínicos e a qualidade de vida dos pacientes, valorizando tanto a eficácia quanto a recuperação minimamente invasiva.
A cirurgia minimamente invasiva (CMI) na urologia tem avançado consideravelmente graças ao desenvolvimento de novas tecnologias. Esse tipo de cirurgia oferece benefícios como menores taxas de complicações e menor tempo de recuperação. Desde a primeira nefrectomia laparoscópica em 1991, a CMI se tornou uma técnica padrão em muitos hospitais. Um dos maiores avanços na cirurgia laparoscópica foi a introdução de plataformas robóticas. Estas oferecem vantagens como a eliminação de tremores, imagens tridimensionais e maior precisão, permitindo a realização de procedimentos mais complexos com maior facilidade e repetibilidade.
A cirurgia robótica utiliza um console controlado remotamente pelos cirurgiões. Essa tecnologia foi inicialmente desenvolvida para telepresença e manipulação cirúrgica em ambientes especiais, como o espaço ou zonas de guerra. A primeira prostatectomia radical robótica foi realizada em 2000 com o sistema da Vinci, da Intuitive Surgical. Desde então, vários avanços foram feitos, culminando no lançamento de várias versões mais avançadas do sistema da Vinci.
O treinamento para cirurgia robótica, atualmente, é predominantemente oferecido pela Intuitive Surgical. No Brasil, o processo inclui aprovação pelo coordenador robótico do hospital, treinamento teórico e prático, e certificação que pode ser obtida em centros no Brasil, Colômbia, Estados Unidos ou Europa. A curva de aprendizado para essa técnica depende de diversos fatores, incluindo a experiência prévia do cirurgião e a disponibilidade da tecnologia.
O alto custo ainda é um fator limitante para a disseminação dessa tecnologia, mas há uma expectativa de redução dos custos com o vencimento de patentes e o surgimento de novas plataformas de cirurgia robótica no mercado. No futuro, espera-se que essa tecnologia se torne mais acessível e seja incorporada aos programas de formação médica em todo o Brasil.
Componentes do Robô da Vinci
O Sistema da Vinci é uma tecnologia avançada de cirurgia robótica composta por vários componentes principais que operam em conjunto para permitir que os cirurgiões realizem procedimentos minimamente invasivos com maior precisão e controle.
Principais Componentes do Sistema da Vinci Si
1. Console do Cirurgião
O cirurgião opera a partir de um console localizado fora do campo operatório.

Neste console, o cirurgião utiliza os olhos, mãos e pés para controlar o endoscópio de 3 dimensões e os instrumentais cirúrgicos. O console possui controles principais e pedais e conta com ajustes ergonômicos para garantir o conforto durante a cirurgia. Importante destacar que o da Vinci é um robô teleoperado, ou seja, não realiza movimentos de forma independente.
2. Cart do Paciente
Este é o componente cirúrgico do sistema.

O cart do paciente suporta os 3 braços de instrumentais e o braço da câmera. Este cart fica no campo operatório e é coberto por um sistema estéril. O auxiliar do cirurgião utiliza este cart para trocar pinças e ajustar os braços do robô durante a cirurgia.
3. Cart do Monitor
O cart do monitor contém a central de processamento e os equipamentos de imagem. Ele inclui um monitor, a central de controle, a fonte de luz e os cabos da câmera 3D, além de espaços para equipamentos adicionais como insufladores e bisturi elétrico.
Tecnologias Associadas e Instrumentais do Sistema da Vinci
Visualização em 3 Dimensões
Diferente da videolaparoscopia, a cirurgia robótica com o sistema da Vinci proporciona uma visualização estereoscópica em 3 dimensões do campo operatório.

Instrumentais Articulados
Os instrumentais do Sistema da Vinci, conhecidos como EndoWrist, oferecem sete graus de liberdade e dois graus de rotação axial, permitindo movimentos precisos e flexíveis.

Instrumentos Específicos
Além dos instrumentais padrão como pinça tipo Maryland, tesoura, pinça bipolar e porta agulha, o sistema inclui um probe de ultrassom intraoperatório com visualização diretamente no console do cirurgião, útil, por exemplo, para localização de lesões renais intraparenquimatosas.

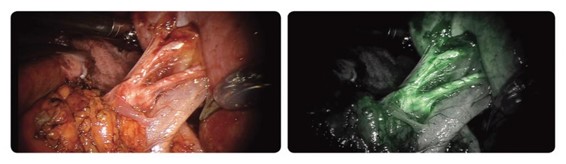
Sistema Firefly Com a injeção intravenosa de um marcador fluorescente, o sistema Firefly facilita a identificação de vasos sanguíneos e a perfusão tecidual, adicionando uma camada adicional de segurança e precisão durante a cirurgia (Figura 6).
Esses componentes e tecnologias trabalham de maneira integrada para proporcionar ao cirurgião uma capacidade única de realizar procedimentos cirúrgicos complexos com uma combinação de precisão, controle e ergonomia que não é possível com técnicas tradicionais de cirurgia minimamente invasiva.